UNSER FAHRZEUG DER SAISON 2020
Seit dem Jahr 2018 können sich die teilnehmenden Teams am Shell Eco Marathon auch in fahrerlosen Disziplinen messen. Von Anfang an bestand von Seiten des TUfast Eco Teams das Interesse, ein autonomes Fahrzeug zu entwickeln. Mit muc018 wurde dies zum ersten Mal erfolgreich umgesetzt und wir konnten in der autonomen Kategorie den 2. Platz erzielen.
Ziel dieser Saison ist es nun, das neuste Auto mit einem autonomen System auszustatten, welches neue Funktionalitäten aufweist, um auch neue und anspruchsvollere Aufgaben zu bewältigen.
Sehr wichtig ist beispielsweise der Einbau und die Inbetriebnahme entsprechender Aktorik. Das Fahrzeug muc019 soll um einen Lenkmotor und ein autonomes Bremssystem erweitert werden. Besonders wichtig ist dabei zum einen die genaue Kalibrierung der Motoren sowie deren Regelung. Die vorher berechnete Trajektorie des Fahrzeugs soll möglichst genau abgefahren werden. Dabei ist sehr wichtig, dass auch die Dynamik des Autos beachtet wird, sodass sich das Fahrzeug unabhängig von äußeren Einflüssen wie gewünscht verhält.
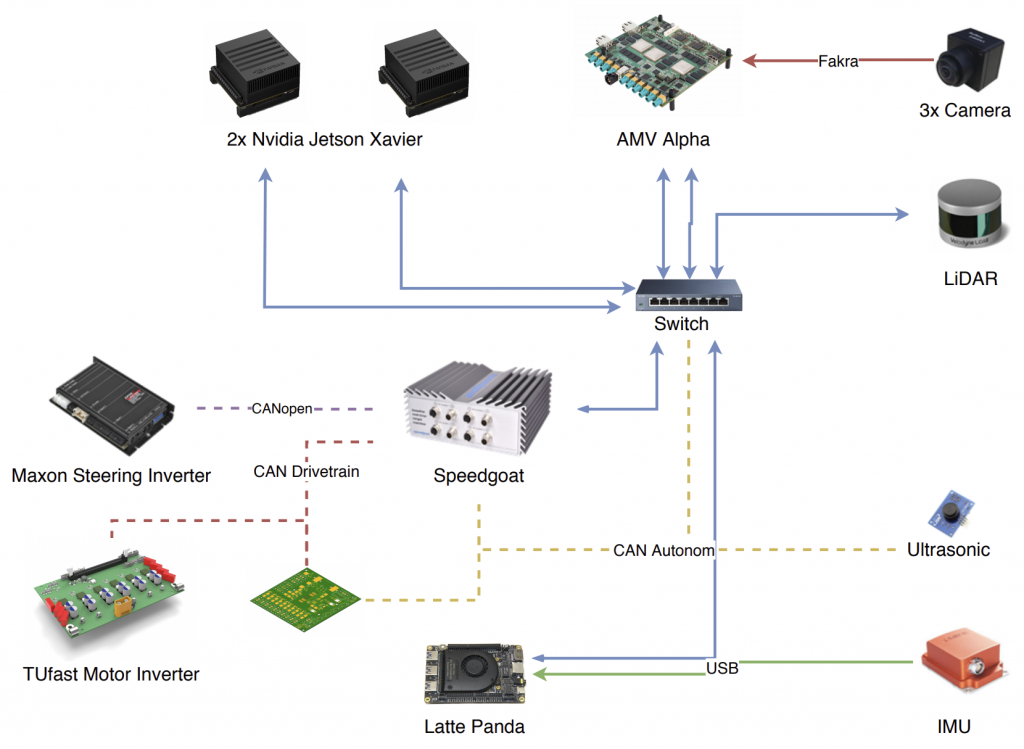
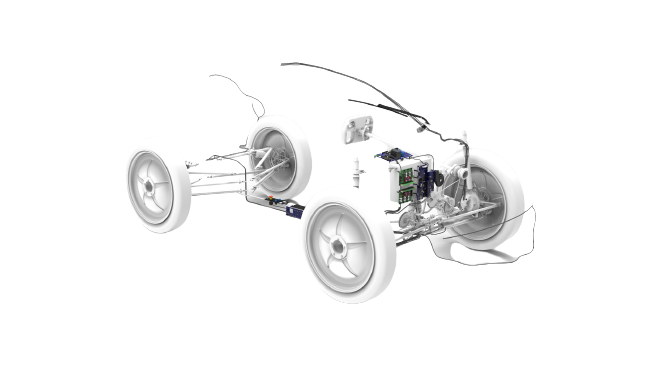
Die Weiterentwicklung hin zu muc019+, wie wir unser Projekt getauft haben, ist bereits in vollem Gange und man versucht durch geschicktes Packaging ein hocheffizientes Design mit autonomen Funktionalitäten zu verbinden. Außerdem soll muc019+ mit diverser Umfeld-Sensorik ausgestattet werden. Hauptbestandteil stellen dabei die drei Kameras dar, die auf dem Dach verbaut werden. Eine Kamera ist mit einem 190° Weitwinkel-Objektiv ausgestattet, um den gesamten Bereich vor dem Fahrzeug abdecken zu können. Die anderen beiden bilden zusammen eine Stereo-Kamera, welche es ermöglicht, die Entfernung von vorausliegenden Objekten abzuschätzen.
Besondere Bedeutung hat auch der LiDAR Sensor auf der Motorhaube, welcher eine 3D-Punktwolke der Umgebung ausgibt. Der Sensor ist so positioniert, dass er Objekte vor dem Fahrzeug und einen Großteil der vorausliegenden Straße gut abdecken kann.
Durch die Fusion von Kamera und LiDAR-Daten soll das Beste aus beiden Welten vereint werden, um ein genaues Modell der Umgebung erstellen zu können. So liefert die Bilderkennung die Information, um welche Art von Objekt es sich handelt und der LiDAR-Sensor wo genau sich dieses Objekt im Raum befindet.
Außerdem sollen überall um das Fahrzeug Ultraschallsensoren eingebaut werden. Diese können Objekte in sehr naher Distanz erkennen und sollen so z.B. das Einparken in eine Parklücke ermöglichen.
Das Hauptziel dieser Saison ist die Teilnahme am „Autonomous Urban Concept“ Wettbewerb im Rahmen des Shell Eco Marathons, sowie die Teilnahme am Effizienzwettbewerb des Shell Eco Marathons. Der „Autonomous Urban Concept“ Wettbewerb verlangt, dass das Auto verschiedene Fahrdisziplinen selbstständig ohne menschliches Eingreifen bewältigt, wie z.B. das Fahren auf einer Strecke mit Banden, das Ausweichen von Hindernissen oder Einparken.
Eckdaten
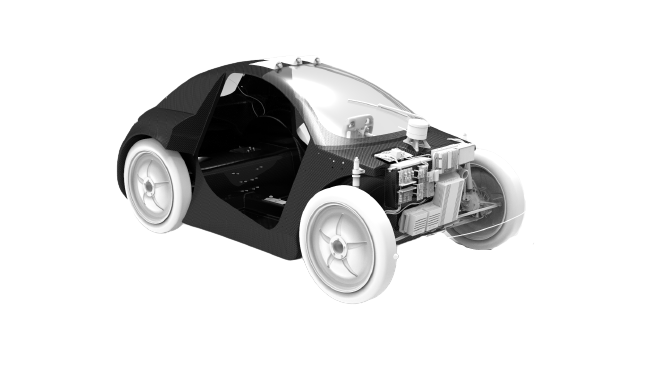
Selbsttragendes Kohlenstofffaserverbundmonocoque
Länge: 2,5m
Zwei Elektromotoren in der gelenkten Vorderachse
Lithium-Polymer-Akkus
- Wettbewerbsakku: Kapazität von 190 Wh und eine Reichweite von 25km
- Akku zum Testen/ für autonomen Betrieb: Kapazität von 480 Wh und eine Reichweite von 64km
Mit Effizienzwert vom Shell Eco Marathon (130,4 km/kWh)

Antrieb
Motoren: Permanenterregte Synchronmaschinen
Selbstentwickelter GaN-Umrichter
Wartungsoptimiertes, steckbares PCB-Design
Kabelreduziertes Design (gesamt 33m)
E-Paper-Memory Display als GUI
CAN-Bus zur Kommunikation zwischen Control Units
Selbstentwickelter Motorregler
Informationsaustausch per CAN
(2x430W)
Chassis
Innovatives Package, gesamter Antriebsstrang und alle Recheneinheiten im Vorderbau, großzügiger Innenraum und Kofferraum
Gesamte Karosserie in Kohlenstofffaserverbundbauweise und Einsatz neuartiger Fügeverfahren
Geschlossenes und lastenoptimiertes Monocoque, einteilig als Sandwichstruktur gefertigt
Nicht strukturelle, aerodynamische Bauteile wie mehrteiliger Vorderbau, Türen, Unterbodenverkleidung und Heckspoiler
Eigenfertigung der CFK-Bauteile mit anforderungsorientierten Verfahren (MTI, VAP, Prepreg-Autoklav)
Fahrwerk
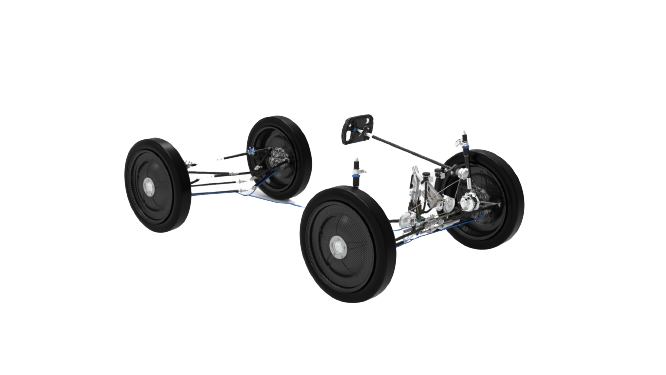
Auf Robustheit optimierte Radträger
Organische, topologieoptimierte Scalmalloy-Radträger
MacPherson-Vorderachse mit elastokinematischer Federung und Dämpfung
Doppelquerlenker-Hinterachse mit Luftfederung und hydraulischer Dämpfung
Seilzugbetätigte Lenkung
Vier hydraulische Scheibenbremsen
Hydraulisch geregeltes autonomes Bremssystem
Spindelgetriebener Lenkmotor zur genaueren Regelung
Autonom
Perception bases on sensor fusion
Modulare Integration in die Plattform
Neue für Anwendungsfall spezialisierte Komponenten
Vereinfachung der Hardwarearchitektur (Reduzierung der Komponenten und Verkleinerung des Kabelbaums)
Bilderkennung mittels neuronaler Netze, die auf computergenerierten Bildern trainiert wurden
Effizientere Trajektorienplanung mit besserer Unterstützung für dynamische Szenarien und komplexere Fahrmanöver
Trajectory following control with state estimation for precise execution of the planned trajectory
Umfangreichere Tests durch den Einsatz von kontinuierlicher Integration und mehreren Simulationspipelines
Selbstentwickelte Lenkungs- und Bremsaktorik